Dynamica 2.80 r151 Crack + License Key
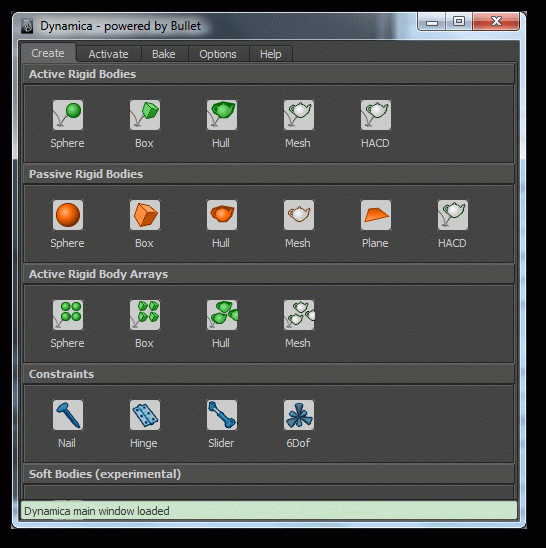
Dynamica plugin was used by Disney for physics special effects in the creation of the movie Bolt. The functionality is provided by four types of custom Maya nodes that interact with each other: dSolver, dRigidBody, dRigidBodyArray, dCollisionShape.
The different nodes can be created thru the Dynamica UI. This UI can be accessed by clicking on the Dynamica icon in the EfxToolsLumiere shelf.
Download Dynamica Crack
| Software developer |
Erwin Coumans
|
| Grade |
3.1
897
3.1
|
| Downloads count | 7534 |
| File size | < 1 MB |
| Systems | Windows XP, Windows Vista, Windows 7, Windows 7 64 bit |
There is only one of this nodes per scene. It controls the global parameters of the simulation, such as time step, library used for the simulation, ecc. It is created automatically every time a Rigid Body or a Rigid Body array is created.
dRigidBody There can be multiple rigid bodies in the scene. It has different attributes that control it's behavior, such as mass, damping, initial position/velocity, ecc. It can be active or passive. An active rigid body is controlled by the forces and collisions in the simulation. A passive rigid body (sometimes called Kinematic) is just keyframed.
dCollisionShape Represents the shape that is used to compute the collisions between rigid bodies. Every rigid body connects to a collision shape. Best practice is to use a collision shape that is good enough to represent the desired collision behavior. The simpler the collision shape, the faster the simulation. Currently the collision shape available are: sphere, box, infinite plane, convex hull, mesh. The convex hull collision shape and the mesh connect directly to a Maya mesh. The mesh collision shape is more precise for concave meshes, otherwise the convex hull shape should be used, because it's faster.
dRigidBodyArray It's like a rigid body but can contain multiple rigid bodies sharing the same collision shape and simulation parameters. It's the node of choice when the rigid bodies have the same shape and speed is required. The attributes that control the initial configuration are: NumRigidBodies, InitialPosition (Multi), InitialRotation (Multi), InitialVelocity (Multi), InitialSpin (Multi).