LIBVISO2 13.02.2012 Crack & Keygen
LIBVISO2, also known as Library for Visual Odometry 2 is built to be a fast and cross-platform C++ library with MATLAB wrappers for computing the 6 DOF motion of a moving mono/stereo camera.
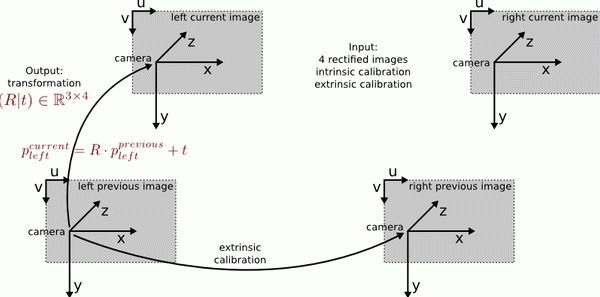
The stereo version is based on minimizing the reprojection error of sparse feature matches and is rather general (no motion model or setup restrictions except that the input images must be rectified and calibration parameters are known).
Download LIBVISO2 Crack
| Software developer |
Andreas Geiger
|
| Grade |
4.3
845
4.3
|
| Downloads count | 7407 |
| File size | < 1 MB |
| Systems | Windows All |
The monocular version is still very experimental and uses the 8-point algorithm for fundamental matrix estimation. It further assumes that the camera is moving at a known and fixed height over ground (for estimating the scale).
Due to the 8 correspondences needed for the 8-point algorithm, many more RANSAC samples need to be drawn, which makes the monocular algorithm slower than the stereo algorithm, for which 3 correspondences are sufficent to estimate parameters.
The most significant differences to LIBVISO1 are as follows:
· No dependencies on external libraries anymore
· Higher feature density (up to 15.000 feature matches)
· Feature matching speed-up of factor 10 (1.000 features take ~35 ms)
· Visual odometry speed-up of factor 100 (4 ms at 1.000 features)
· Also supports monocular egomotion estimation now
· Monocular scale estimated by assuming a fixed camera height over ground
· Features can be tracked over a short period of time
· Structure-from-Motion pipeline (3D reconstruction)