Webots PRO R2023a Crack + Activation Code Download 2025
Before creating a robot or any other form of mechanized artificial intelligence, it is important to consider a few test and simulations before actually designing a machine. This ensures you that your design is correctly adapted to the environment it will be working in.
Creating a environment and prototype simulation requires powerful software, with precise and well defined physics and mechanics.
Download Webots PRO Crack
| Software developer |
Cyberbotics Ltd
|
| Grade |
4.3
1359
4.3
|
| Downloads count | 13624 |
| File size | < 1 MB |
| Systems | Windows Vista, Windows 7, Windows 8, Windows 8 64 bit |
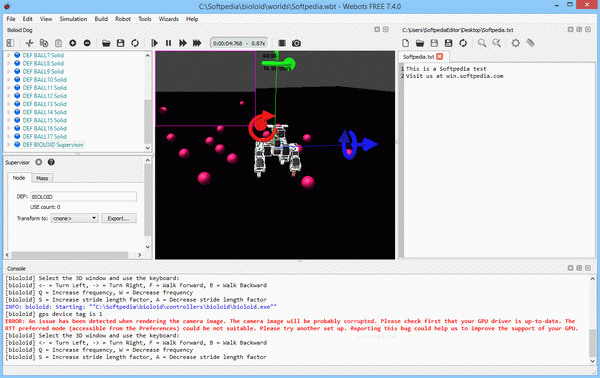
This is where Webots PRO could come in handy. The application helps you create a virtual environment and simulate a robot prototype to see how it reacts to the surrounding objects.
Webots PRO features a sturdy environment and prototype simulator that allows you to define a realistic scenario in which you can set a prototype to start interacting.
You can simulate most environments with realistic physics, and then insert prototyped robots to perform various interactions, in order to verify their response to exterior stimuli. Webots PRO will create log files with every action and reaction simulated, so you can analyze every aspect of your prototype.
Furthermore, the controller program of the robot can be easily transferred to real robots, meaning that you can virtually simulate the actions of a robot or machine without actually testing the robot in the real world, which sometimes can be hazardous.
Webots PRO Serial allows you to video capture the simulated environment and all the prototypes it contains, thus allowing you to share with others the simulations and tests that you have run.
For instance, you need to make simulations during a press conference or lecture. You can simply present a movie simulation that contains the prototype of a expensive robot without risking to break it or causing it to malfunction.
Webots PRO helps you create realistic scenarios in which you can test prototypes of actual robots to see how they should react to a real environment.